Название колледжа: ФГОУ СПО «Оскольский политехнический колледж»
Название изобретения или изделия: Проектирование и изготовление лабораторного стенда «Устройства автоматики с магнитоуправляемыми контактами»
Назначение лабораторного стенда
Лабораторный стенд “Преобразование угловых перемещений исполнительного механизма в электрические сигналы с помощью герконов” предназначен для преобразования углового перемещения выходного вала исполнительного органа — реверсивного механизма РМ-10 (в дальнейшем РМ-10) в дискретные электрические сигналы, формируемые при срабатывании герконов.
Рабочие условия эксплуатации лабораторного стенда:
температура окружающего воздуха от плюс 5°С до плюс 50°С;
относительная влажность от 30 до 80 % при температуре 25°С;
напряжение питающей сети (220±2) В частотой 50 Гц.
Лабораторный стенд применяют в измерительных лабораториях в качестве наглядного учебного пособия.
Технические данные лабораторного стенда
Потребляемая мощность, Вт, не более 120
Напряжение питания частотой 50 Гц 220 В ± 10 %
Габаритные размеры стенда, мм 420 х 250 х 210
Масса, кг 8
Класс защиты от поражения электрическим током 2
Класс защиты от внешних воздействий IP44
Лабораторный стенд представляет собой электромеханическое устройство закрытого исполнения.
Лабораторный стенд рассчитан для работы в стационарных условиях при температуре окружающего воздуха от плюс 5°С до плюс
50°С и относительной влажности от 30 до 80 % при температуре 25°С.
Тип управления исполнительным механизмом — оптронно-тиристорное управление.
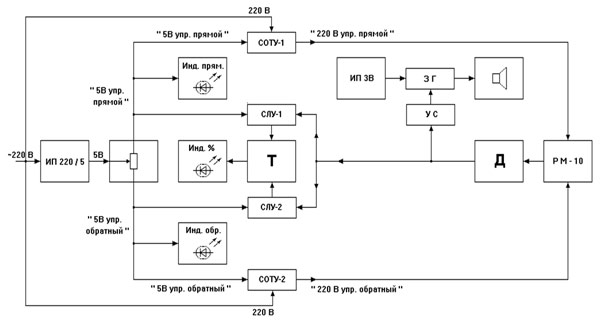
Блок-схема лабораторного стенда
На представленной блок-схеме лабораторного стенда
Применены следующие условные обозначения:
ИП 220 / 5 — Источник питания 220 / 5 вольт
— Орган управления
Инд. прям. — Схема световой индикации направления вращения выходного вала РМ-10 в прямом направлении.
Инд. обр. — Схема световой индикации направления вращения выходного вала РМ-10 в обратном направлении.
Инд. % — Схема световой индикации положения выходного вала РМ-10 в пространстве.
Т — Триггеры.
СЛУ-1 — Схема логического управления 1.
СЛУ-2 — Схема логического управления 2.
РМ-10 — Реверсивный механизм (Исполнительный орган).
Д — Датчики (герконы).
СОТУ-1 — Схема оптронно-тиристорного управления 1.
СОТУ-2 — Схема оптронно-тиристорного управления 2.
ЗГ — Звуковой генератор (для звуковой сигнализации срабатывания герконов).
УС — Устройство согласования.
ИП 3В — Источник питания 3 вольта.
— Громкоговоритель.
“5В упр. прямой” — управляющий сигнал прямого направления выходного вала РМ-10, соответствует логической 1.
X
“5В упр. обратный”— управляющий сигнал обратного направления выходного вала РМ-10, соответствует логической 1.
X
“220 В упр. прямой” — сигнал управления РМ-10 в прямом направлении.
“220 В упр. обратный”— сигнал управления РМ-10 в обратном направлении.
Назначение блоков схемы и их взаимодействие
ИП 220 / 5 — Источник питания 220 / 5 вольт. Этот блок предназначен для преобразования напряжения переменного 220 В 50 Гц, в напряжение 5В, необходимое для питания остальных блоков электрической схемы.
— Орган управления. Предназначен для формирования управляющих сигналов “5В упр. левый” или “5В упр. правый” , необходимых для согласованной работы остальных блоков электрической схемы.
РМ-10 — Реверсивный механизм (Исполнительный орган). Предназначен для преобразования сигналов “220 В упр. прямой” и “220 В упр. обратный” в угловое перемещение выходного вала РМ-10 для воздействия на датчики (герконы) посредством закрепленного на выходном валу магнита.
СОТУ-1 — Схема оптронно-тиристорного управления 1. Имеет 2 входа: “5В упр. прямой”, и для питания 220 В. На выходе формирует сигнал “220 В упр. прямой” для включения РМ-10 в прямом направлении.
СОТУ-2 — Схема оптронно-тиристорного управления 2. Имеет 2 входа: “5В упр. обратный”, и для питания 220 В. На выходе формирует сигнал “220 В упр. обратный” для включения РМ-10 в обратном направлении.
СОТУ-1 и СОТУ-2 выполнены на основе полупроводниковых приборов и реализуют бесконтактную коммутацию (включение, отключение) РМ-10.
Инд. прям. — Эта схема предназначена для световой индикации направления вращения выходного вала РМ-10 в прямом направлении. Входным сигналом, разрешающим работу этой схемы является сигнал “5В упр. прямой”.
Инд. обр. — Эта схема предназначена для световой индикации направления вращения выходного вала РМ-10 в обратном направлении. Входным сигналом, разрешающим работу этой схемы является сигнал “5В упр. обратный”.
Д — Датчики (герконы). Датчики предназначены для формирования информационных сигналов о положении в пространстве выходного вала РМ-10.
СЛУ-1 — Схема логического управления 1. Имеет 2 входа: “5В упр. прямой”, и информационный вход для сигналов с датчиков (герконов). СЛУ-1 “обрабатывает” входные сигналы и выдает сигналы на триггеры.
СЛУ-2 — Схема логического управления 2. Имеет 2 входа: “5В упр. обратный”, и информационный вход для сигналов с датчиков (герконов). СЛУ-2 “обрабатывает” входные сигналы и выдает сигналы на триггеры.
Т — Триггеры. Схема предназначена для хранения сигналов, поступающих со схем СЛУ-1 и СЛУ-2.
Инд. % — Эта схема предназначена для световой индикации положения выходного вала РМ-10. Входным сигналом, разрешающим работу этой схемы является выходной сигнал с триггеров. Схема Инд. % отображает информацию о пространственном положении выходного вала РМ-10 в процентах.
ЗГ — Звуковой генератор (для звуковой сигнализации срабатывания герконов).
УС — Устройство согласования. Схема предназначена для согласования работы схемы звукового генератора и датчиков (герконов).
ИП 3В — Источник питания 3 Вольта. Этот блок представляет собой батарею из 2-х элементов типа АА общим напряжением 3 вольта. Предназначен для независимого питания схемы звукового генератора.
— Громкоговоритель. Предназначен для преобразования электрических сигналов в акустические. С помощью громкоговорителя мы слышим сигнал, поступающий с выхода звукового генератора.
Описание работы лабораторного стенда
При подаче напряжения на блок питания (ИП 220 / 5), переменное 220 В 50 Гц преобразуется в напряжение 5В, необходимое для питания блоков электрической схемы. С выхода блока питания напряжение 5В подается на орган управления, который представляет собой переменный резистор. На выходах органа управления формируются сигналы “5В упр. прямой” или “5В упр. обратный”, необходимые для согласованной работы блоков электрической схемы.
Сигнал “5В упр. прямой” преобразуется в блоке СОТУ-1 в сигнал “220 упр. прямой” для включения реверсивного механизма РМ-10 в прямом направлении. Одновременно, сигнал “5В упр. прямой” воздействует на схему (Инд. прям.) для световой индикации направления вращения выходного вала РМ-10 в прямом направлении. Сигнал “5В упр. прямой” подается также на схему СЛУ-1, где участвует в “обработке” сигналов, приходящих с датчиков (герконов).
Сигнал “5В упр. обратный” преобразуется в блоке СОТУ-2 в сигнал “220 упр. обратный” для включения реверсивного механизма РМ-10 в обратном направлении. Одновременно, сигнал “5В упр. обратный” воздействует на схему (Инд. обр.) для световой индикации направления вращения выходного вала РМ-10 в обратном направлении. Сигнал “5В упр. обратный” подается также на схему СЛУ-2, где участвует в “обработке” сигналов, приходящих с датчиков (герконов).
Реверсивный механизм РМ-10 — это “силовой агрегат” стенда.
РМ-10 состоит из:
- однофазного асинхронного двигателя.
- редуктора.
- пуско-регулирующих устройств.
- концевых выключателей.
РМ-10 управляется переменным напряжением 220В.
Выходной вал РМ-10 может вращаться в прямом и обратном направлении. Управление реверсивным механизмом РМ-10 осуществляется органом управления через схему бесконтактного оптронно-тиристорного управления. Управление в прямом направлении реализуется с помощью схемы СОТУ-1. Управление в обратном направлении реализуется с помощью схемы СОТУ-2.
Для индикации положения выходного вала РМ-10 применены герконы.
Закрепленный на выходном валу РМ-10 постоянный магнит перемещается пропорционально углу поворота выходного вала. При своем перемещении магнит приближается поочередно к датчикам (герконам) и своим магнитным полем вызывает срабатывание соответствующего геркона. Герконы расположены на таком расстоянии друг от друга, чтобы магнитное поле постоянного магнита вызывало срабатывание только одного геркона. Срабатывание любого из пяти датчиков (герконов) воспринимается схемой логического управления СЛУ-1 или СЛУ-2 , которая передает управляющий сигнал на соответствующий этому геркону триггер. Срабатывание триггера вызывает включение соответствующего ему светодиода. По включению светодиодов (Инд.%) можно иметь информацию о срабатывании герконов и, соответственно, о положении в пространстве выходного вала РМ-10.
Для дополнительной звуковой сигнализации срабатывания герконов применена схема звукового генератора (ЗГ). При получении сигнала с любого из герконов, схема устройства согласования (УС) формирует одиночный короткий импульс для запуска схемы звукового генератора. Звуковой сигнал длительностью около 2 сек., полученный с выхода звукового генератора, свидетельствует о срабатывании одного из пяти герконов.
Заключение
Лабораторный стенд предусматривает оптронно-тиристорное управление реверсивным двигателем РМ-10 с применением интегральных микросхем, что позволило реализовать логико-командное управление в соответствии с выбранным режимом работы и обеспечить преобразование углового перемещения выходного вала исполнительного механизма в дискретные сигналы, определяемые срабатыванием установленных герконов.
Портал журнала «Наука и жизнь» использует файлы cookie и рекомендательные технологии.
Продолжая пользоваться порталом, вы соглашаетесь с хранением и использованием
порталом и партнёрскими сайтами файлов cookie и рекомендательных технологий на вашем устройстве.
Подробнее



 — Орган управления
— Орган управления  — Громкоговоритель.
— Громкоговоритель.