Автор: О. Пащенко (студентка Южно-Уральского государственного университета, Аэрокосмический факультет, Кафедра «Летательные Аппараты и Автоматические Установки», Студенческое конструкторское бюро сверхлегких летательных аппаратов «СКБ СЛА»).
Научный руководитель: А.С. Воронкин, инженер-конструктор «РСК «МиГ».
Проект утвердил: С.В. Махнович, к.т.н., доц. каф. «ЛА и АУ»
Аэрокосмический факультет ЮУрГУ.
Введение
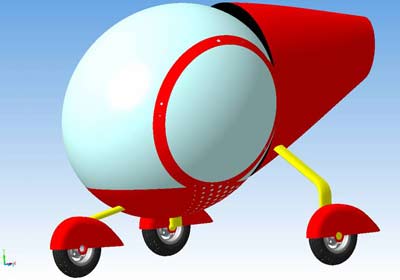
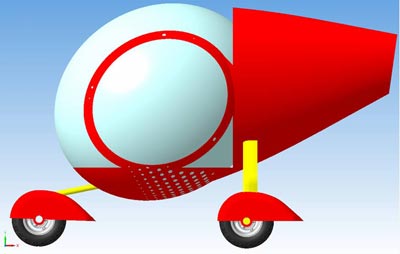
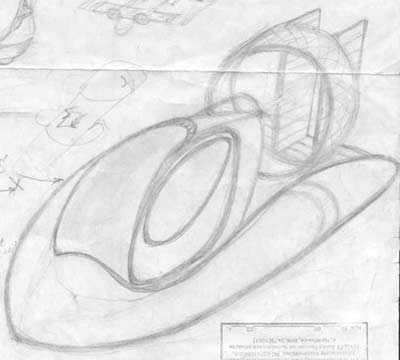
Модульное транспортное средство (далее по тексту – МТС) предназначено для использования в качестве индивидуального транспортного средства и рассматривается как один из видов общественного транспорта, позволяющий обойтись без личного автомобиля. Его основное преимущество – высокая автоматизация процесса перевозки, что позволяет рассматривать данный аппарат как элемент областного транспортного комплекса с автоматизированным управлением движением, не только дорожным, но и воздушным на низких эшелонах, а также водным движением. Ядро комплекса – высокоинтеллектуальная система сбора, обработки, анализа данных и прокладки маршрутов с использованием широкого числа датчиков, в том числе – и установленных на МТС. Участие человека в данной системе сведено к минимуму – система информирует об отказе отдельных блоков и местонахождении дефекта, функционирование самой системы продолжается на прежнем уровне за счет резервирования. Пользователи услуг системы – все граждане без ограничений. Человек вызывает МТС нажатием кнопки вызова на остановке общественного транспорта. Ближайший МТС прибывает на место, забирает пассажира и везет в указанный им пункт маршрута. Высадив пассажира, МТС автоматически едет на ближайшую стоянку (пункт зарядки батарей), или по ближайшему вызову (по команде системы управления движением транспорта, которая учитывает текущий уровень зарядки конкретного МТС и в случае необходимости организует пересадку, о чем уведомляет пассажира стандартным сообщением, проецируемым на лобовое стекло).
Техническое описание
1. Силовая конструкция – ферма из нержавеющей стали. Снаружи – двухслойный кокон из тепло-звукоизолирующих композитов, загрунтованных слоем покрытия TermalCoat;
2. Лобовое стекло с системой струйного смыва снаружи и подогревом тёплым воздухом изнутри;
3. Параметры движения и информация о функционировании систем проецируются на лобовое стекло (аналогично Индикации на Лобовом Стекле современных истребителей);
4. По дну кокона – аккумуляторная батарея;
5. Носовая стойка – с механическим или гидроприводом, мотор-колесо;
6. Задние колёса с гидромеханическим дисковым тормозом;
7. Пульт управления кнопочный, встроенный в подлокотники кресла. Рычаг «Аварийное торможение» возле правой руки;
8. Управление двухрежимное – ручное и автомат. В автоматическом режиме в навигатор закладываются конечный пункт маршрута и промежуточный пункт маршрута (в случае необходимости). О текущем положении бортовой компьютер знает от системы спутниковой навигации GPS/ГЛОНАСС. Кратчайшую дорогу выбирает сам с учётом информации о пробках. Полный автопилот – водитель может спать в кабине. Радар автоматически избегает опасности изменением режима движения (скорость и направление). В ручном режиме – езда в произвольном направлении с возможностью регулировки скорости.
9. Сверху – воздухозаборник с каплеуловителем (включается при попадании капель дождя), питающий системы кондиционирования, вентиляции, обогрева и охлаждения;
10. Фары ближнего света управляемы из кабины;
11. Регулируемое по высоте и углу наклона сиденье с подогревом.
Подлокотники с пультами опускаются вниз для удобства посадки и покидания кабины.
12. Багажный отсек за спиной водителя разделён на две секции. Крышка багажного отсека позволяет закатывать по ней тяжёлые грузы в нижний отсек.
13. Обзор задней и боковых полусфер – с помощью видеокамер, изображение с которых проецируется на верхнее и боковые фрагменты лобового стекла аналогично зеркалам. Виды можно отключить, но при приближении объектов они будут включаться самостоятельно.
14. Дверь открывается выдвижением «этап разгерметизации» и поворотом вокруг центральной оси.
15. «Дозаправка» зарядкой аккумуляторных батарей от сети 220 В, или замена батарейных модулей на АЗС (все действия производятся «автоматом заправки»):
а) МТС устанавливается на специальную платформу по ограничителям;
б) автомат вывинчивает болты крепления поддона с аккумуляторными батареями;
в) поддон с аккумуляторными батареями откатывается на зарядное устройство;
г) с лотка раздачи заряженных устройств выкатывается поддон с заряженными батареями;
д) автомат устанавливает поддон и завинчивает болты крепления.
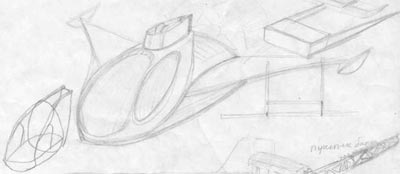
16. При возникновении необходимости преодоления значительных расстояний, МТС используется в качестве легкого самолета, для чего на него устанавливаются модуль центроплана с встроенным блоком бортового радиоэлектронного оборудования (БРЭО) и системой спасения, килевые балки, консоли (с баками-кессонами), горизонтальное и вертикальное оперение, модуль силовой установки (поршневой двигатель, например-Rotax-503, редуктор, воздушный винт). Система управления рулевыми поверхностями и двигателем – электродистанционная (ЭДСУ), по командам от автопилота. Порядок переоборудования МТС следующий:
а) до аэропорта МТС доезжает в качестве автомобиля, дальнейшие действия производятся квалифицированным персоналом аэропорта;
б) отстыковка обтекателя на крыше МТС;
в) навеска модуля центроплана с встроенным блоком бортового радиоэлектронного оборудования и разъемами топливной системы;
г) навеска килевых балок, стабилизатора с рулем высоты, килей с рулями направления;
д) установка модуля силовой установки в верхний багажный отсек;
е) стыковка консолей;
ж) стыковка электроразъемов ЭДСУ, топливной системы и привода с электромотора на воздушный винт (в полете двигатель через генератор заряжает аккумуляторы, а в случае отказа двигателя воздушный винт можно кратковременно приводить от электродвигателя, между валом воздушного винта и валом двигателя – обгонная муфта);
з) заправка крыльевых баков и тестирование БРЭО.
В течение всего полета от взлета до посадки МТС управляется автопилотом. Пассажир вводит конечный пункт маршрута, автопилот выстраивает маршрут с учетом актуальных данных по метео-обстановке, указывает промежуточные пункты маршрута для дозаправки и расчетное время прибытия. Пассажир соглашается нажатием одной кнопки. Возврат управления происходит только на земле в конечном пункте маршрута. Система спасения приводится в действие как автопилотом в случае возникновения нештатной ситуации, так и пассажиром в случае отказа автопилота.
17. Имеется возможность использовать МТС в качестве глиссера с автопилотом или ручным управлением (в прогулочном варианте). Порядок переоборудования следующий:
а) установка МТС в лодку на посадочные места и фиксация;
б) установка кормового модуля с топливным баком;
в) установка модуля поршневого двигателя с редуктором и блоком управления в верхний багажный отсек;
г) установка воздушного винта и кожуха с рулями;
д) подключение разъемов топливной системы и системы управления.
Заключение
С технической точки зрения создание данных систем – дело ближайшего будущего. Здесь нет никаких принципиально нереализуемых решений. Единственным препятствием к широкому внедрению модульных транспортных средств в качестве общественного транспорта является их низкая «вандалостойкость». До тех пор, пока отношение к общественной собственности не изменится с «общее – значит ничьё» на «общее – значит и моё тоже», развитие данных систем будет сдерживаться. Начальный этап отработки системы можно начать с крупного объекта – например – производственного комплекса, заменив электрокары на МТС, и реализовав контроль за их сохранностью. В дальнейшем систему можно укрупнять до уровня системы управления движением транспорта всей страны.
Портал журнала «Наука и жизнь» использует файлы cookie и рекомендательные технологии.
Продолжая пользоваться порталом, вы соглашаетесь с хранением и использованием
порталом и партнёрскими сайтами файлов cookie и рекомендательных технологий на вашем устройстве.
Подробнее